One of the best applications for a robot is one requiring repetitive and consistent behaviors. The mapping of subsurface characteristics of lakes is just such an endeavor.
“These studies are extremely tedious. Detailed mapping requires piloting the boat very slowly back and forth across the same water body. It would be like mowing several thousand acres of lawn,” says Jim Patek, inventor of H2rObot. To make matters worse, OSHA requires at least two people to be in the boat, which causes the boat to be heavier–reducing the amount of water area it can analyze due to the substantial shallow area it has to map. “When trying to map several fringe marsh areas on Matagorda Bay, we were able to navigate into less than 20% of the study area due to depth restrictions of the boat.”
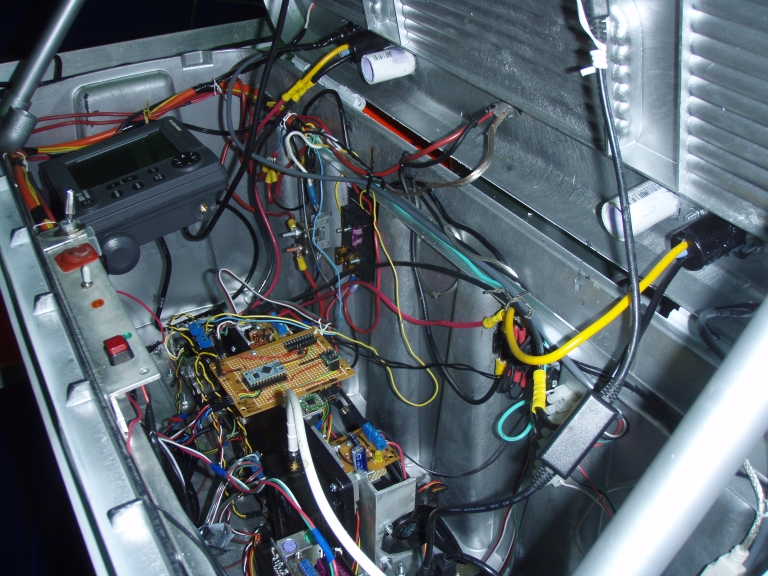
When Environmental Engineer Jim Patek of Cedar Park, TX thought about these problems, he decided to build H2rObot–an autonomous boat ‘bot that can deploy various mapping packages. The robot is a catamaran that carries what looks to be a pair of watertight ice chests. The pontoons are each about the size of a canoe. Both have electric trolling motors controlled by a central computing system contained within the watertight compartments. System central processors run a flavor of Linux called “SLAX,” and several PIC controllers that interface with the actuators.
For navigation, the robot uses GPS, a compass, three accelerometers and three gyros. Patek also devised a system using an advanced predictive algorithm called a “Kalman Filter,” allowing the robot to navigate from waypoint to waypoint in spite of hardware performance.

The robot stays in contact with a land-side laptop while running in autonomous mode. If it loses contact, it will first try to back-track to reacquire a signal. Failing that, it shuts down, begins blinking a flashing light, and yelps a 900mHz chirp while Patek goes looking for it.
Patek has been educated in water sciences, a self-described “aquatic biologist turned engineer.” He was working on his PhD in Aquatic and Mathematical Ecology when he decided to switch schools and become an Environmental Engineer. However, “Anyone with much field work will know that being a good scientist or engineer is great, but for field work, being a good mechanic, electrician, carpenter, machinist, is better. This worked out well for me since I started working in an automotive shop with mechanics to whom I was related just as soon as I was tall enough to see over the fender.”
Patek built many robots over the last decade and a half but he described H2rObot as his most ambitious.