Researchers at EPFL in Switzerland have unveiled a reversible robotic hand that redefines dexterity in robotic grippers.1 This design moves away from human anatomy by using a symetrical “reversible” palm that supports up to six identical silicone-tipped fingers forming opposing pairs as needed.12 Bringing a touch of The Iron Giant movie to real life, the hand can even detach and crawl spider-like while grasping objects.15
Development Background
The reversible robotic hand comes from EPFL’s Learning Algorithms and Systems Laboratory (LASA) and Computational Robot Design and Fabrication Lab.1 Key contributors include Aude Billard, head of LASA, along with researchers Xiao Gao, Kai Junge, and Josie Hughes.1 The project took place at EPFL’s School of Engineering in Switzerland.12
The research appeared in Nature Communications, highlighting advances in loco-manipulation for robotics.1 This work addresses limitations in traditional grippers tied to human hand asymmetry.1 EPFL’s labs focus on innovative designs that push beyond conventional approaches.
Design Innovations
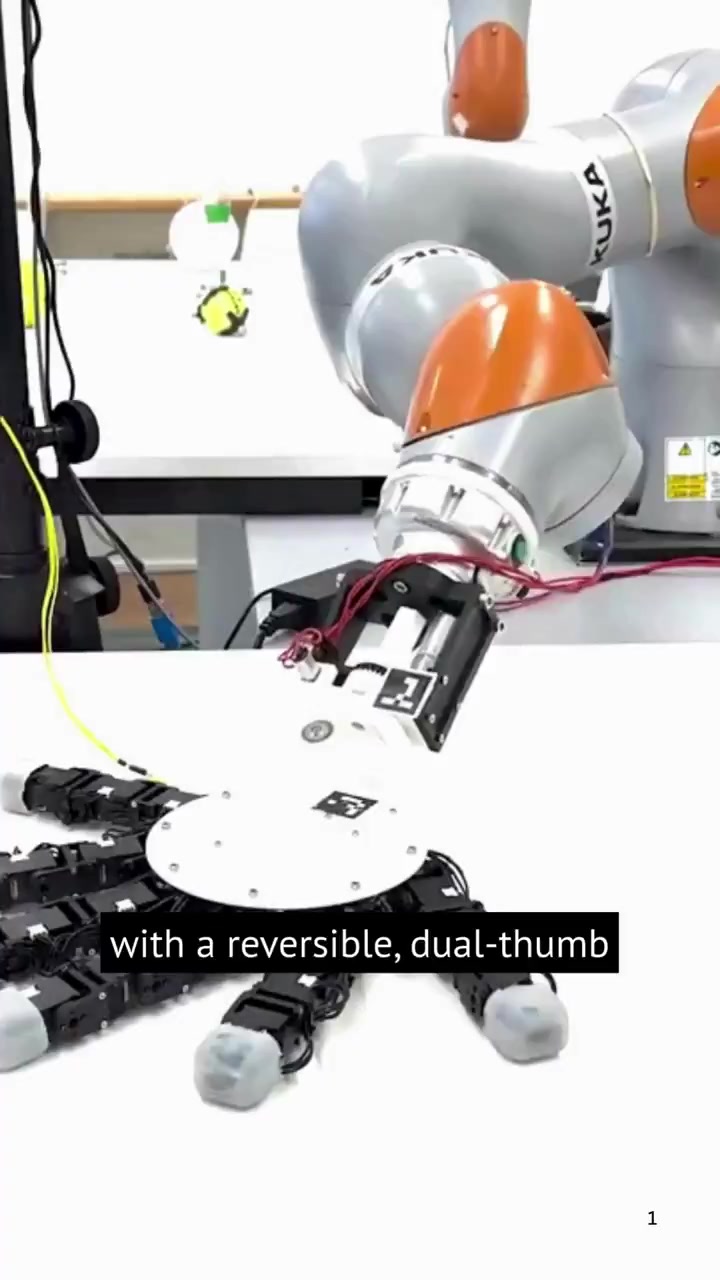
The core of this reversible robotic hand is its symmetric reversible palm, where the back and palm sides interchange easily.124 Up to six identical fingers can attach, dynamically pairing to create thumb-like opposition for pinching.1 With five fingers, it handles most human-style grasps effectively.1
Adding more than five fingers allows the hand to tackle two-handed tasks, such as unscrewing bottle caps or using a screwdriver.1 The hand fully detaches from its robotic arm for independent operation.1 This overcomes the inefficiencies of human wrist designs noted in early reactions.1
Technical Breakdown
Each finger uses small electric motors for movement, connected by lightweight 3D-printed joints that bend forward and backward.5 Soft silicone caps on the fingertips provide the friction needed for secure gripping.5 These joints enable fingers to curl, spread, and flip orientations without relying on wrist rotation.5
The overall setup supports loco-manipulation, blending manipulation with mobility.1 No fixed limit exists on the number of objects it can hold, as extra fingers add capacity.1 This flexibility sets it apart from standard grippers.
Demonstrated Capabilities
In videos, the reversible robotic hand crawls like a spider while keeping a firm grip on objects under its palm, back, or both sides.135 It performs loco-manipulation by grasping and transporting items beyond the arm’s direct reach.1 These demos show its potential for complex, independent actions.
The design shines in maintaining holds during movement across surfaces.1 Observers have called it a hardware upgrade fixing human wrist shortcomings.1 Such versatility opens new possibilities in robotic tasks.
Applications and Impact
This technology suits industrial, service, and exploratory robotics where compactness and adaptability matter.1 It can fetch objects from confined or hazardous spots, extending the range of standard industrial arms.15 Researchers note its value for multi-modal interactions beyond human capabilities.5
Future adaptations could serve prosthetics or human augmentation, tapping into the brain’s ability to adapt.15 The symmetric structure fits specialized environments needing enhanced manipulation.5 Overall, it promises broader robotic utility.
Paths Forward / Looking Ahead
Researchers at EPFL envision the reversible robotic hand entering real-world use soon, especially in confined environments and with industrial arms.1 Its detachable nature allows access to tight spaces where full arms cannot go, improving efficiency in manufacturing and exploration.1 Adaptation for prosthetic limbs seems promising, as human brains can rewire to control extra or symmetric appendages effectively.5 This could transform assistive devices for those with limb differences.
The symmetrical design supports tasks in unique settings that demand more than human hands provide.5 Ongoing work may refine loco-manipulation for everyday service robots, like those in homes or warehouses.1 As fabrication improves, costs could drop, making advanced dexterity accessible across industries.1 Ultimately, this innovation bridges gaps in current robotic limitations.
Sources for this article
- EurekAlert: Reversible, detachable robotic hand redefines dexterity
- EPFL News: Reversible, detachable robotic hand
- YouTube: Demonstration video of the robotic hand
- AZoRobotics: EPFL’s reversible robotic hand news
- LiveScience: Creepy robotic hand detaches and scurries
- Rocking Robots: EPFL develops detachable robotic hand
Leave a Reply